عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






QS-200 Collision Sensor0 pages
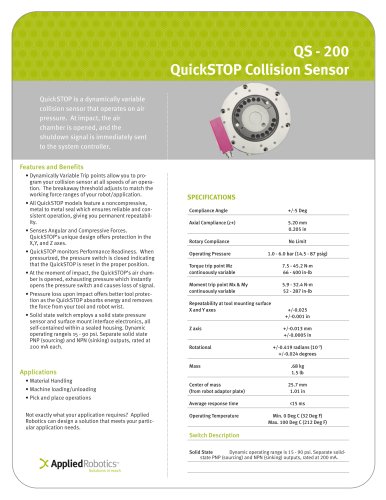
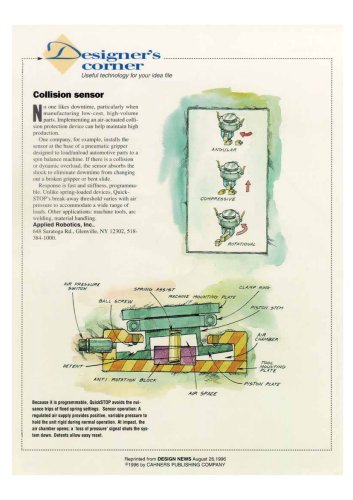
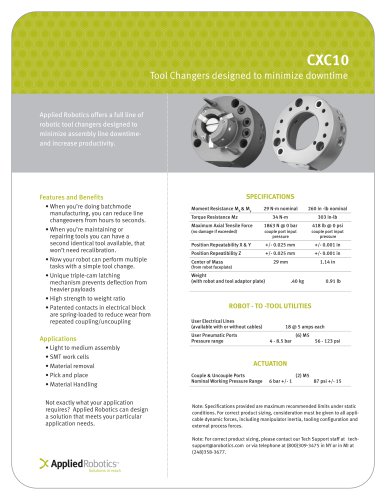
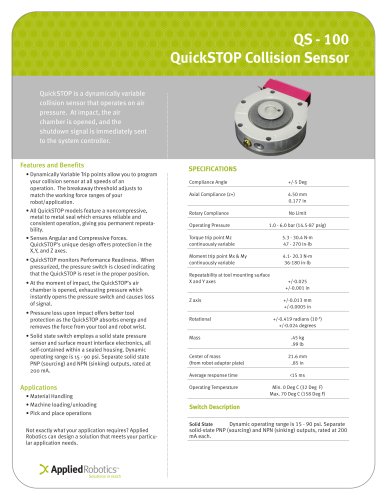
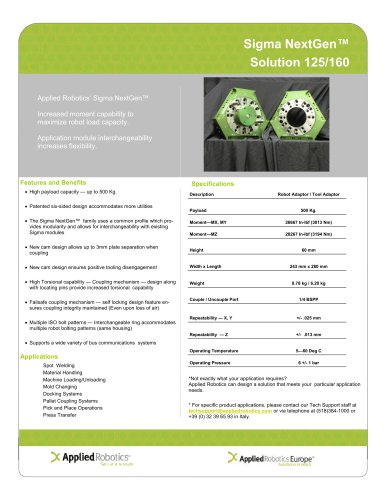
QuickSTOP Collision Sensor
nnnnQuickSTOP is a dynamically variable
nnnncollision sensor that operates on air
nnnnpressure. At impact, the air
nnnnchamber is opened, and the
nnnnshutdown signal is immediately sent
nnnnto the system controller.
nnnnFeatures and Benefits
nnnn• Dynamically Variable Trip points allow you to pro-
nnnngram your collision sensor at all speeds of an opera-
nnnntion. The breakaway threshold adjusts to match the
nnnnworking force ranges of your robot/application.
nnnn• All QuickSTOP models feature a noncompressive,
nnnnmetal to metal seal which ensures reliable and con-
nnnnsistent operation, giving you permanent repeatabil-
nnnnity.
nnnn• Senses Angular and Compressive Forces.
nnnnQuickSTOP's unique design offers protection in the
nnnnX,Y, and Z axes.
nnnn• QuickSTOP monitors Performance Readiness. When
nnnnpressurized, the pressure switch is closed indicating
nnnnthat the QuickSTOP is reset in the proper position.
nnnn• At the moment of impact, the QuickSTOP's air cham-
nnnnber is opened, exhausting pressure which instantly
nnnnopens the pressure switch and causes loss of signal.
nnnn• Pressure loss upon impact offers better tool protec-
nnnntion as the QuickSTOP absorbs energy and removes
nnnnthe force from your tool and robot wrist.
nnnn• Solid state switch employs a solid state pressure
nnnnsensor and surface mount interface electronics, all
nnnnself-contained within a sealed housing. Dynamic
nnnnoperating rangeis 15 - 90 psi. Separate solid state
nnnnPNP (sourcing) and NPN (sinking) outputs, rated at
nnnn200 mA each.
nnnnApplications
nnnn• Material Handling
nnnn• Machine loading/unloading
nnnn• Pick and place operations
nnnnNot exactly what your application requires? Applied
nnnnRobotics can design a solution that meets your partic-
nnnnular application needs.
nnnnApplied Robotics
nnnnSolutions in reach
nnnnSPECIFICATIONS
nnnnCompliance Angle
nnnn+/-5 Deg
nnnnAxial Compliance (z+)
nnnn5.20 mm
nnnn0.205 in
nnnnRotary Compliance
nnnnNo Limit
nnnnOperating Pressure
nnnn1.0-6.0 bar (14.5 ■ 87 psig)
nnnnTorque trip point Mz
nnnncontinuously variable
nnnn7.5-45.2 N-m
nnnn66-400in-lb
nnnnMoment trip point Mx & My
nnnncontinuously variable
nnnn5.9-32.4 N-m
nnnn52 - 287 in-lb
nnnnRepeatability at tool mounting surface
nnnnX and Y axes
nnnn+/-0.025
nnnn+/-0.001 in
nnnnZ axis
nnnn+/-0.013 mm
nnnn+/-0.0005 in
nnnnRotational
nnnn+/-0.419 radians (103)
nnnn+/-0.024 degrees
nnnnMass
nnnn.68 kg
nnnn1.5 lb
nnnnCenter of mass
nnnn(from robot adaptor plate)
nnnn25.7 mm
nnnn1.01 in
nnnnAverage response time
nnnn<15 ms
nnnnOperating Temperature
nnnnMin. 0 Deg C (32 Deg F)
nnnnMax. 100 Deg C (212 DegF)
nnnnSwitch Description
nnnnSolid State Dynamic operating range is 15 - 90 psi. Separate solid-
nnnnstate PNP (sourcing) and NPN (sinking) outputs, rated at 200 mA.
"