عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






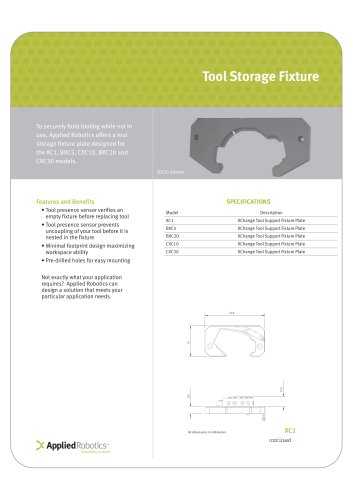
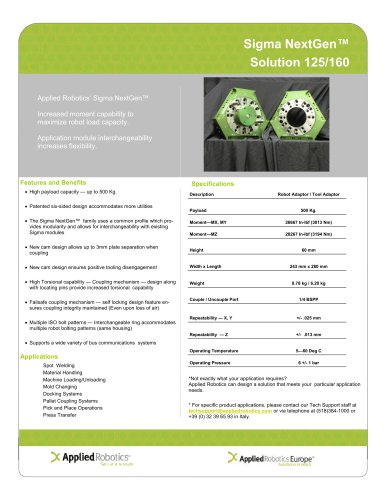
Electrical grippers0 pages
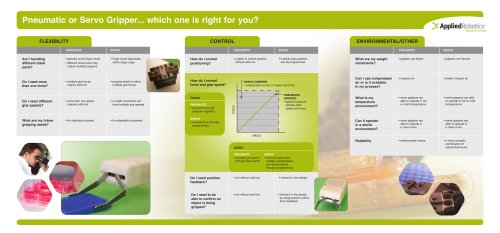
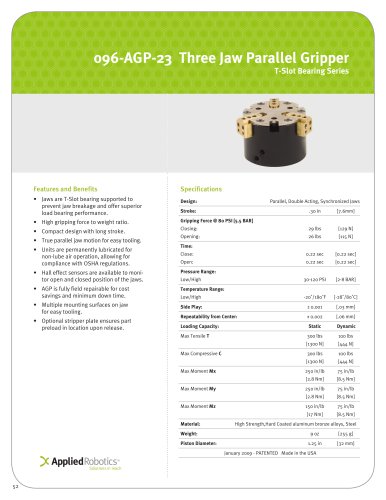
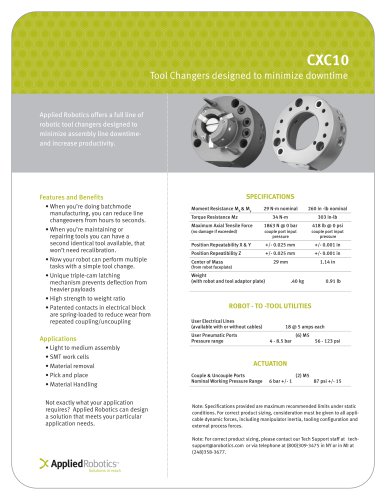
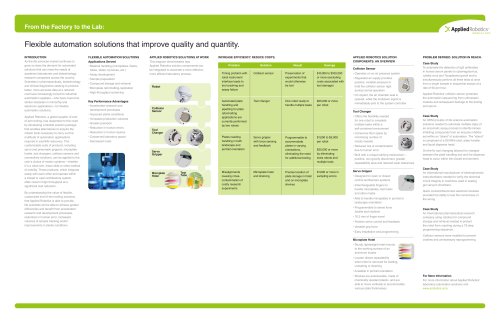
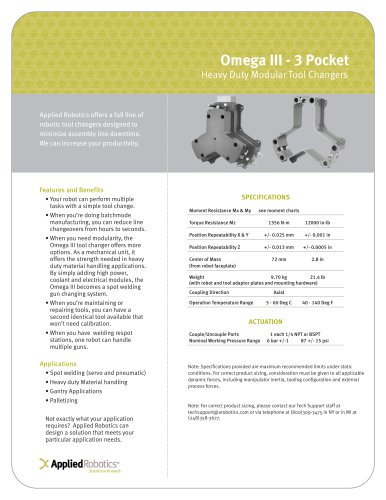
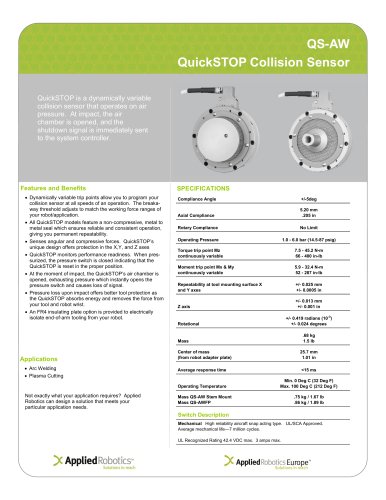
Pneumatic or Servo Gripper... which one is right for you
nnnnFLEXIBILITY
nnnnAm 1 handling different sized parts? | • typically small finger travel • different sized parts may require multiple grippers |
Do 1 need more than one force? | • multiple grip forces require add-ons |
Do 1 need different grip speeds? | • more than one speed requires add-ons |
What are my future gripping needs? | • for dedicated process |
■ finger travel adjustable
nnnnwithin large range
nnnnprogrammable to allow
nnnnmultiple grip forces
nnnna single movement can
nnnnhave multiple grip speeds
nnnn■ for adaptable processes
nnnnHow do I control
nnnnpositioning?
nnnnHow do I control
nnnnforce and grip speed?
nnnnNEUMATIC
nnnn■ unable to control position
nnnnwithout add-ons
nnnn■ multiple stop positions
nnnncan be programmed
nnnnDo I need position
nnnnfeedback?
nnnnDo I need to be
nnnnable to confirm an
nnnnobject is being
nnnngripped?
nnnn• not without add-ons
nnnn• not without add-ons
nnnninherent in the design
nnnn■ inherent in the design
nnnnby using position and/or
nnnnforce feedback
nnnnf
nnnnApplied Robotics-
nnnnSolutions "n reach
nnnnWhat are my weight * grippers are lighter • grippers are heavier
nnnnconstraints?
nnnnCan I use compressed
nnnnair or is it available
nnnnin my process?
nnnnrequires air
nnnn■ doesn't require air
nnnnWhat is my
nnnntemperature
nnnnenvironment?
nnnn• some grippers are
nnnnable to operate in hot
nnnnor cold temperatures
nnnn■ some grippers are able
nnnnto operate in hot or cold
nnnntemperatures
nnnnCan it operate
nnnnin a sterile
nnnnenvironment?
nnnn• some grippers are
nnnnable to operate in
nnnna clean room
nnnn• some grippers are
nnnnable to operate in
nnnna clean room
nnnnReliability
nnnn• mechanically simple
nnnn• a more complex
nnnncombination of
nnnnelectromechanics
"