عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






M-410iB Series0 pages

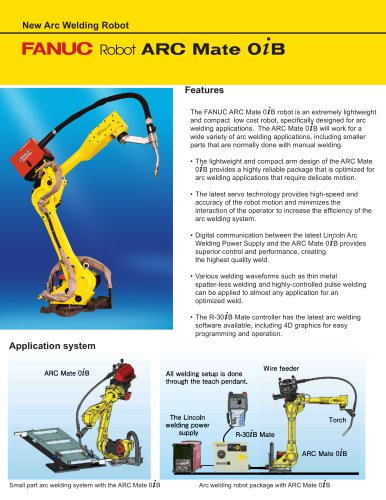
FANUC Robot M-410/B/700
Intelligent palletizing robot
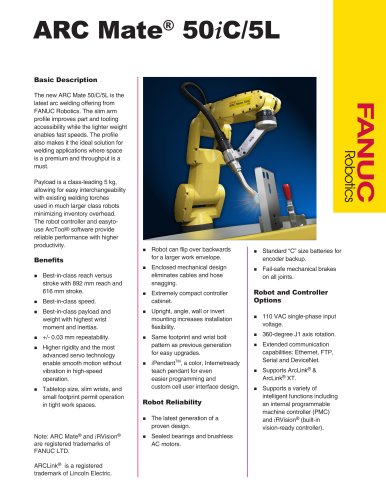
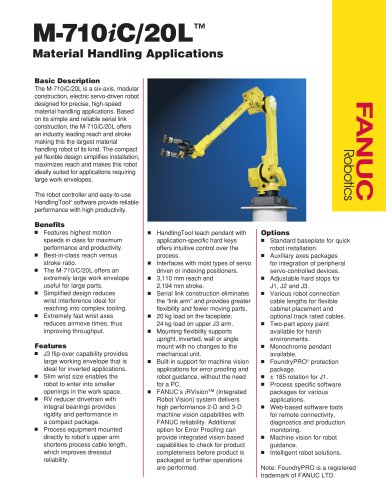
Operating space
FANUC Robot M-410/B
Specifications
Item | Specifications | |
M-410IB/700 | ||
Type | ArticulatedType | |
Controlled axes | 4 axes (J1,J2,J3,J4) | |
Reach | 3.14m | |
Installation | Floor | |
Motion range (Maximum speed) (Note!) | J1 axis rotation | 360° ( 607s) 6.28 rad (1.05 rad/s) |
J2 axis rotation | 144° ( 607s) 2.51 rad (1.05 rad/s) | |
J3 axis rotation | 136° ( 607s) 2.37 rad (1.05 rad/s) | |
J4 axis rotation | 540° (1207s) 9.42 rad (2.09 rad/s) | |
Max. load capacity at wrist | Max.700 kg | |
Allowable load inertia at wrist | 490 kg • m2 5000 kgf • cm • s2 | |
Throughput (Note2) | 700 cycles/hour | |
Drive method | Electric servo drive by AC servo motor | |
Repeatability | ± 0.5 mm | |
Mass (Note3) | 2700 kg | |
Installation environment | Ambient temperature: 0~45°C Ambient humidity : Normally 75%RH or less (No dew, nor frost allowed) Short term Max. 95%RH or less (within one month) Vibration : 0.5G or less | |
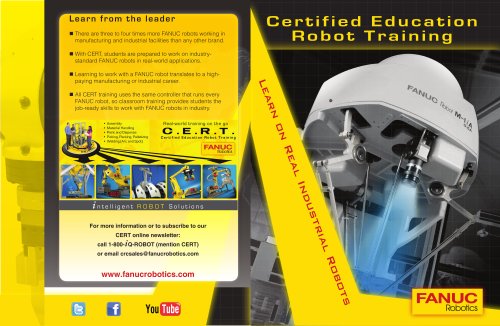
Application Systems
Note 1) In case of short distance motion, the axis speed doesn't reach maximum one.
Note 2) With maximum payload, the horizontal range is 2000mm and vertical one is 400mm.
Note 3) Controller mass (120kg) is included.
FANUC
FANUC AMERICA CORPORATION
3900 WEST HAMLIN ROAD
ROCHESTER HILLS MI 48309-3253
MARKETING@FANUCAMERICA.COM FANUCAMERICA.COM 888-FANUC-US
) 2014 FANUC America Corporation. All Rights Reserved.
FANUC LITHO IN U.S.A. FRA - 2/24/2014
Features
• The M-410ZB series is the ideal intelligent solution for
automation of palletizing systems.
• The wide range of M-410ZB robot variations make it
suitable for any application and payload.
FANUC Robot M-410/B/140H
140kg payload, high speed type
FANUC Robot M-410/B/160
160kg payload, high speed type
FANUC Robot M-410/B/300
300kg payload, heavy payload type
FANUC Robot M-410/B/450
450kg payload, heavy payload type
FANUC Robot M-410/B/700
700kg payload, super heavy payload type
• The M-410ZB robot series comes ZRVision ready and
can be programmed and simulated through ROBOGUIDE.
- Detection of height of workpieces
- Discrimination of a part size or type
- Visual inspection
- Sorting of workpieces
- Depalletizing the load on a received pallet
- Easy to create a palletizing program
- Motion optimization of a program
Box Palletizing
Bag Palletizing
"