عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






New Magnetic Levitation System0 pages

GOOGOLTECH
Magnetic Levitation System
metsyS noitativeL citengaM
-- A new design with integrated laser sensor
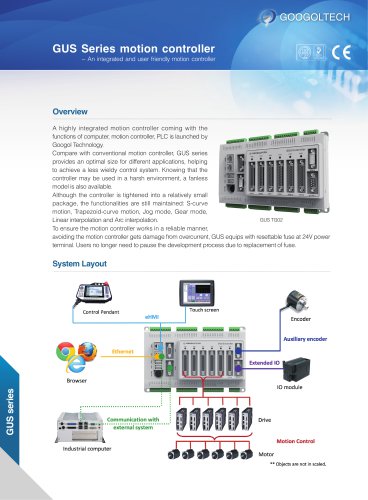
Overview
Magnetic levitation is a classical technology in mechatronics. It combines
electromagnetism and electronics technology, control technology, signal
processing, mechanics, and dynamics. The technology is widely used in
many industry elds such as magnetic levitation train, magnetic suspension
bearing, miniature transmission equipment, measuring instrument, robotic
wrist, magnetic levitation educational system, etc.
The Magnetic Levitation System (Model: GML2001) from Googoltech provides
an ideal experiment platform for research and tutorial for undergraduate and
graduate students studying classical control theory and modern control theory.
Apart from its modern designed appearance, laser sensor is also applied as
feedback signal to measure moving distance of the oating ball accurately.
In addition, the Magnetic Levitation body (Model: GML2001A) can be provided
as a standalone experimental device for any third party or self-designed
controller.
System Features
Students can thoroughly comprehend PID tuning, root locus tuning, frequency
domain method tuning, status feedback control method with Matlab software
platform experiment course.
Via optional analog control system, by observing and comprehending the
structure of control system and the characteristic of driving module, students
can construct embedded magnetic levitation controller by combining the
analog control system with DSP, ARM, MCU, etc. The embedded discrete
control algorithm can be perfected by comparing control results.
Students can select components such as photoelectric, ultrasonic, infrared distance detecting sensor to build up the magnetic levitation body; and
construct complete magnetic levitation system with self-designed embedded
controller.
Laser sensor is used as feedback signal. Through the experiments, the
non-linearity of the system can be directly viewed by the distribution of the
electromagnetic eld.
Magnetic Levitation
Matlab Control Interface
Use Root Locus Control as an example (support Matlab version 2012b or above):
GML2001A
Control Principle
When the ball moves up and down vertically under the
electromagnet, the laser sensor right below the ball
detects the distance between the apex of the ball and
the lowest part of the electromagnet. It converts the
voltage signal to the controller. The controller calculates
the output current level of the electromagnet coils. The
emerged magnetic force can levitate the ball under the
electromagnetic stably in any arbitrary position within
the range.
Due to the characteristic of the mathematical modeling
of the device that the composed unit is unstable without
the controller, a corresponding controller must be
designed to stabilize the system. As the linearization
has to be carried out around a non-zero operating
point, it is therefore very challenging.
Experiment contents
Based on Matlab platform:
※ System modeling experiment and analysis;
※ PID tuning & PID controller design;
※ Root locus tuning, frequency domain method
tuning, and status feedback.
Based on analog control system:
※ PID tuning & analog control experiments.