عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






AGG0 pages

AGG
AGG
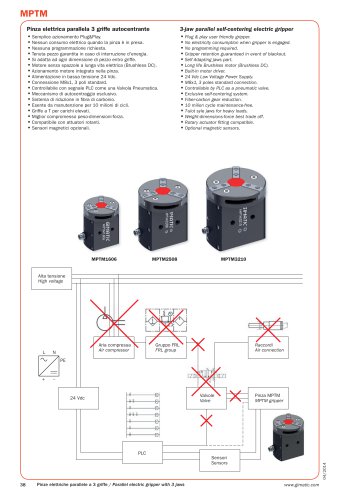
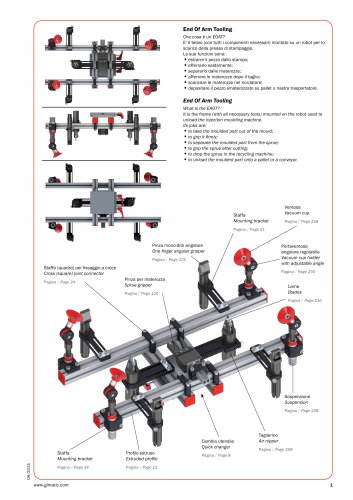
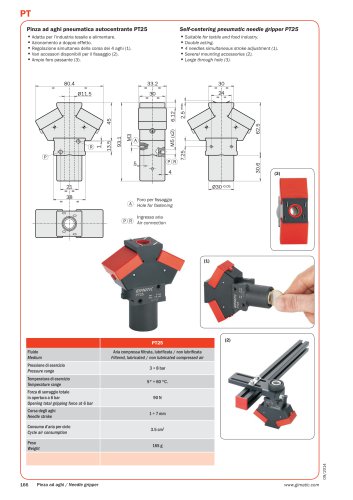
Pinza per agganciamento
Gripper for engagement
La AGG é usata per centrare in modo preciso il robot sullo stampo.
Questo é necessario quando si devono posizionare degli inserti
metallici nello stampo, prima di iniettare la plastica.
La pinza AGG…-B è montata sull’EOAT e la bussola AGG…-C in
acciaio sullo stampo.
Dopo che il robot si é avvicinato allo stampo, la pinza viene
alimentata, così si chiude e si aggrappa sulla bussola.
AGG21-B e AGG30-B sono a doppio effetto con molla di sicurezza
che mantiene agganciata la pinza anche in mancanza d’aria (NC).
AGG19-B è a semplice effetto con molla di ritorno (NO).
The AGG is used to provide a precise centering between the robot
and the mould.
This is necessary when metal inserts must be placed in the
mould, before the plastic injection.
The gripper AGG…-B is tted on the EOAT, while the steel bushing
AGG…-C is tted on the mould.
Once the robot has approached the mould, the gripper is
pressurized, thus it closes and engages the bushing.
AGG21-B and AGG30-B are double-acting with a safety spring to
keep the gripper engaged even without compressed air (NC).
AGG19-B is single-acting with reset spring (NO).
AGG30-B
AGG21-B
AGG19-B
AGG21-C
AGG21-C
AGG30-C
AGG19-B
0N
600 N
1400 N
2000 N
2000 N
5000 N
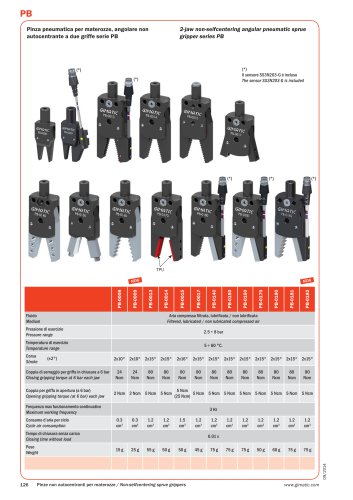
Pressione di esercizio
Pressure range
AGG30-B
AGG30-B
Massimo carico assiale con aria compressa prima
della rottura
Maximum axial load with compressed air before
breakage
AGG30-C
AGG21-B
2 ÷ 8 bar
(NO)
4 ÷ 8 bar
(NC)
4 ÷ 8 bar
(NC)
Massimo carico assiale senza aria compressa
prima del rilascio
Maximum axial load without compressed air
before releasing
Temperatura di esercizio
Temperature range
5 ÷ 60 °C.
AGG21-B / AGG30-B
AGG19-B
AGG21-C / AGG30-C
09/2014
AGG21-C
120
Pinza per agganciamento / Gripper for engagement
www.gimatic.com
"