عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






X SERIES CO0 pages

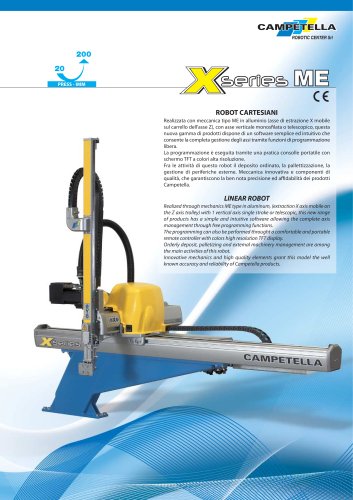
table.main {} tr.row {} td.cell {} div.block {} div.paragraph {} .font0 { font:11.00pt "Lucida Sans Unicode", sans-serif; } .font1 { font:12.00pt "Lucida Sans Unicode", sans-serif; } .font2 { font:17.00pt "Lucida Sans Unicode", sans-serif; } «OBOnCCEWTERS" 400 40 PRESS -1 MM ROBOT CARTESIANI Realizzati con rneccdnkd di tipo CO (asse estrazione X fisso sul carrello dell'asse Z senza nessun ingombro verso il lato trarnoggia dlia pressa iniezione), questi robot sono dedicati alla manipolazione di pezzi stampati su presse di pkcoloemedio tonnellaggio (da 40a 400 ton.) con portate fno a 6 Kg. I motori brushless sincroni sono gestiti da azionamenti collocati su armadio di controlto a borda La programmazione 鯨 eseguita tramite una pratica consolle portatile con schermo TFT a colon alla risoluzione» Per questi modelli sono previste due configurazbni dell'asse Y (L e S) con conseguente diversificazione di prestazione Ivelocrta ed accelerazione) e portata. UNEAR ROBOT Reatized through mchantes CO type (extraction Xaxis fixed on the Z axis trottey without any obstruction on the hopper-side oftht injection pressa thse robots are devoted to the handting of pi騨ces ptoduced by smatt and mdium tonnage mouldin machines (from 40 up to 400 tons) with paytoad up to 6 Kg$. The brushless synchronous motors are managed by driving gears located on a control cabinet mounted on board the robot Theprogramming con aho be performed through a comfonoble ondportabte remote contrler with colon high r鴩solution TFT tUsplay* for thse modets are aiso provided two diffrent Y axis configuration (L and S) which permit diff詩rent performances (speed and acclration) and payhod.
"