عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






TV8000 pages
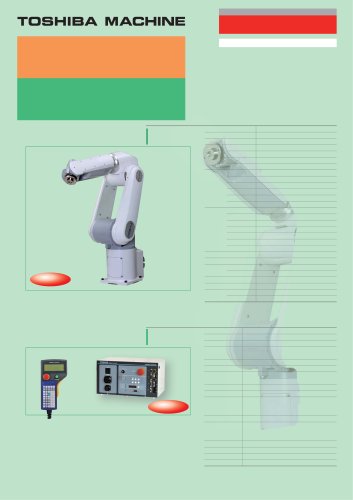
TOSHIBA MACHINE
nnnnNEW PRODUCT
nnnnVERTICAL ARTICULATED ROBOT
nnnnTV800
nnnnEZCell
nnnnPROGRAMMING SUPPORT TOOL
nnnnEASY OPERATION!
nnnnEASY PROGRAMMING!
nnnnEASY CONVERSION FROM CAD/CAM DATA!
nnnnRobot
nnnnSpecifications
nnnnController
nnnnSpecifications
nnnnController
nnnnTS3100
nnnnTEACH PENDANT(OPTION)
nnnnRETURN OF INVESTMENT
nnnnHIGH RIGIDITY
nnnnHIGH DURABILITY
nnnnFAST CYCLE TIME
nnnnLIGHT WEIGHT DESIGN
nnnnUSER FRIENDLY SOFTWARE
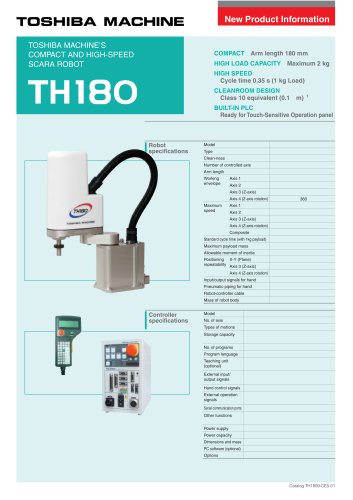
nnnnModel | TV800 | ||
Type | Vertical Articulated Robot | ||
Number o | [controlled axis | 6 axis | |
- -*1 Arm Length | \ Total Length | 800mm | |
1 st Arm | 380mm | ||
2nd Arm | 420mm | ||
Reach | 892mm | ||
Working envelope | Axis 1(J1) | ±170° | |
v Axis 2(J2) | -100~+150° | ||
Axis 3(J3) | -127~+167° | ||
Axis 4(J4) | ±190° | ||
Axis 5(J5) | ±120° | ||
Axis 6(J6) | ±360° | ||
Maximurr speed*1 | Axis 1(J1) | 237°/s | |
Axis 2(J2) | 240°/s | ||
Axis 3(J3) | 288°/s | ||
Axis 4(J4) | 350.5°/s | ||
Axis 5(J5) | 484°/s | ||
Axis 6(J6) | 576°/s | ||
Composite | 8.06m/sec | ||
Maximum payload mass | 5kg | ||
Standard cycle time*2 | 0.4~0.5sec | ||
Allowable moment c inertia at enc | Axis 4,5 | - | 0.3kg-m2 |
f- Axis 6 | 0.05kg-m2 | ||
Positioning | repeatability*3 | | F ±0.02mm(X-Y-Z) | |
Position detecting system | Absolute system/AC servo motor | ||
r-\ i . i i Mass Robot body- | 48kg | ||
Color | Light gray/White | ||
*1 The acceleration/deceleration rates may be load mass and offset amount. *2:Continous operation is not possible beyond tl | mited depending on motion patterns, e effective load ratio on the standard | ||
cycle time motion pattern.
nnnnHorizontal 300mm,Vertical 25mm, round-trip
nnnn#3:At constant temperature
nnnnModel | TS3100 | |
No.of axis | Maximuim eight-axis simultaneous control | |
Operation mode | PTP,CP(linear-Circular),Short-cut,Arch motion | |
Storage capacity | Total: 12800 points + 25600 steps 1 program: 2000 points + 3000 steps | |
No.of programs | Max.256(247 user files + 9 system files) | |
Programming language | SCOL(proprietary,similar to BASIC) | |
Teaching unit(option) | Teach pendant TP1000, with 5-mater cable (Program can be written on PC) | |
External I/O | 32 inputs/32 outputs | |
Hand control signals | 8 inputs/^8 outputs | |
External operation signal(exclusive) | lnputs:Cycle operation start,stop,reset,etc 0utpufs:Servo-0n status, emergency stop, ready for operation, malfunction alarm, etc | |
Serial communication port | RS-232C: 2 ports, Ethernet: 1 port*4 | |
Other functions | Torque control,Interruptive functions, self-diagnosis, I/O control and communications during motion, Coordinate calculations, Built-in PLC, etc | |
Power supply | Single phase AC200V-250V 50/60Hz 4.4kVA | |
Outer dimensions and mass | 420WX230HX298D(mm),17kg | |
PC software(option) | TSPC---Program editor,Teaching,Remote operation,etc | |
Options | I/O extension, I/O cables, Field-NetworktCC-Link.DeviceNet.Prafibus)*4 | |
1:Ethernet is a registered trademark of XEROX Corp. in the U.S.A.
nnnnCC-Link is a registered trademark of CC-Link Partner Association.
nnnnDeviceNet is a registered trademark of ODVA.
nnnnProfibus is a registered trademark of Profibus User Organization.
"