عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Simscape0 pages
Simscape
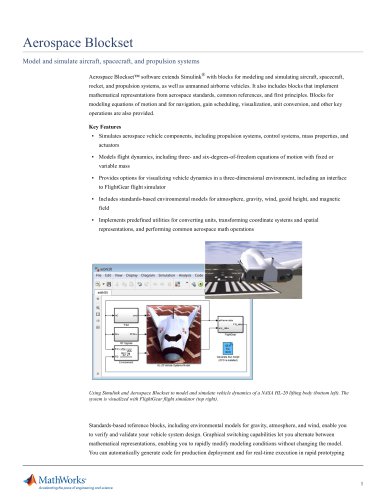
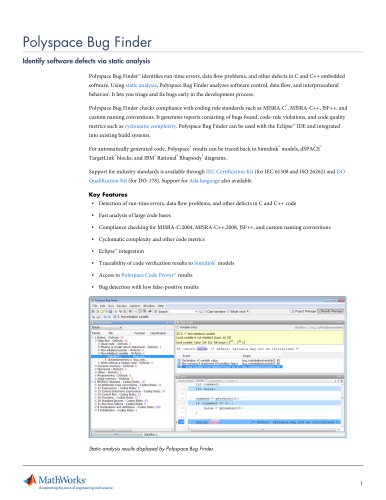
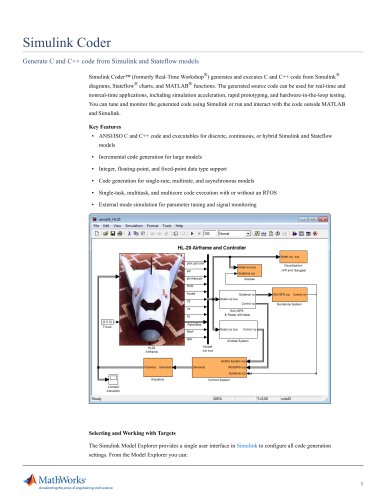
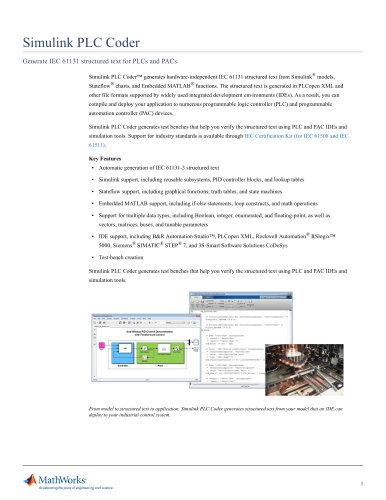
Model and simulate multidomain physical systems
Simscape™ provides an environment for modeling and simulating physical systems spanning mechanical,
electrical, hydraulic, and other physical domains. It provides fundamental building blocks from these domains
that you can assemble into models of physical components, such as electric motors, inverting op-amps, hydraulic
valves, and ratchet mechanisms. Because Simscape components use physical connections, your models match the
structure of the system you are developing.
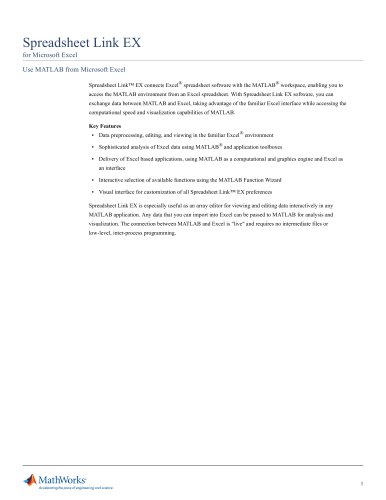
Simscape models can be used to develop control systems and test system-level performance. You can extend the
libraries using the MATLAB® based Simscape language, which enables text-based authoring of physical
modeling components, domains, and libraries. You can parameterize your models using MATLAB variables and
expressions, and design control systems for your physical system in Simulink®. To deploy your models to other
simulation environments, including hardware-in-the-loop (HIL) systems, Simscape supports C-code generation.
Learn more about physical modeling.
Key Features
▪ Single environment for modeling and simulating mechanical, electrical, hydraulic, thermal, and other
multidomain physical systems
▪ Libraries of physical modeling blocks and mathematical elements for developing custom components
▪ MATLAB based Simscape language, enabling text-based authoring of physical modeling components,
domains, and libraries
▪ Physical units for parameters and variables, with all unit conversions handled automatically
▪ Ability to simulate models that include blocks from related physical modeling products without purchasing
those products
▪ Support for C-code generation
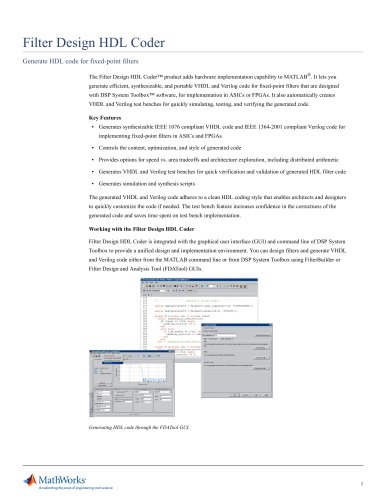
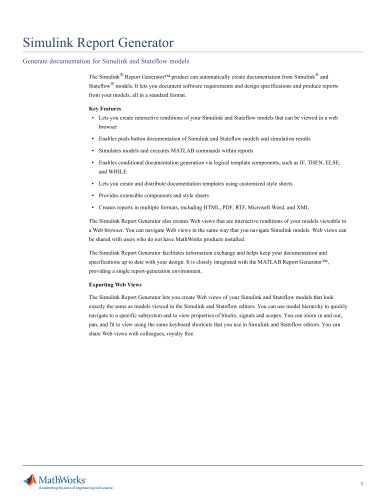
Modeling a DC Motor 6:31
Model a DC motor using electrical and mechanical physical modeling components.
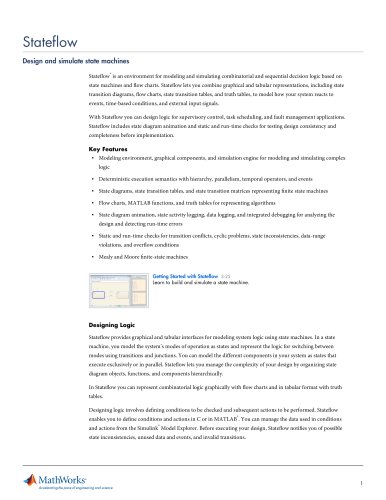
Simscape is used to optimize system-level performance and to create plant models for control design. The models
you create support your entire development process, including hardware-in-the-loop simulations.
1
"