عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






SimMechanics0 pages

SimMechanics
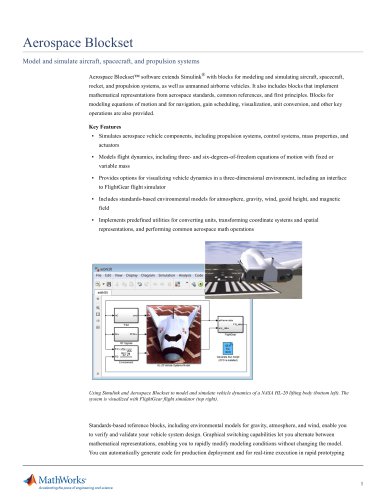
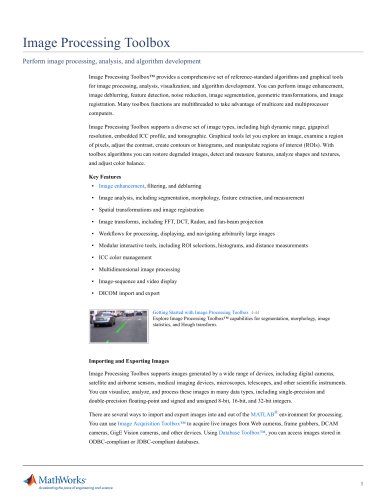
Model and simulate multibody mechanical systems
SimMechanics™ provides a multibody simulation environment for 3D mechanical systems, such as robots,
vehicle suspensions, construction equipment, and aircraft landing gear. You model the multibody system using
blocks representing bodies, joints, constraints, and force elements, and then SimMechanics formulates and solves
the equations of motion for the complete mechanical system. Models from CAD systems, including mass, inertia,
joint, constraint, and 3D geometry, can be imported into SimMechanics. An automatically generated 3D
animation lets you visualize the system dynamics.
You can parameterize your models using MATLAB® variables and expressions, and design control systems for
your multibody system in Simulink®. You can add electrical, hydraulic, pneumatic, and other components to your
mechanical model using Simscape™ and test them all in a single simulation environment. To deploy your models
to other simulation environments, including hardware-in-the-loop (HIL) systems, SimMechanics supports C-code
generation (with Simulink Coder™).
Learn more about physical modeling.
Key Features
▪ Blocks and modeling constructs for simulating and analyzing 3D mechanical systems in Simulink
▪ Rigid body definition using standard geometry and custom extrusions defined in MATLAB
▪ Automatic calculation of mass and inertia tensor
▪ Simulation modes for analyzing motion and calculating forces
▪ Visualization and animation of multibody system dynamics with 3D geometry
▪ SimMechanics Link utility, providing an interface to Pro/ENGINEER®, SolidWorks®, and Autodesk®
Inventor®, and an API for interfacing with other CAD platforms
▪ Support for C-code generation (with Simulink Coder)
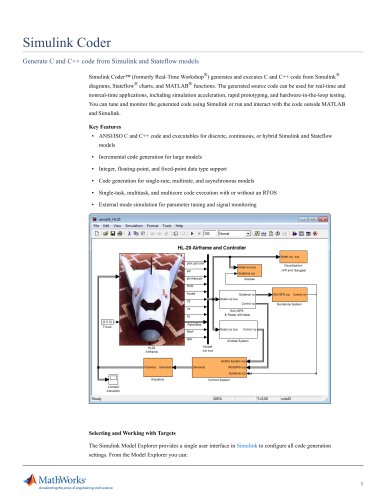
Modeling a Piston 8:57
Model a piston using multibody dynamics. Bodies, joints, and 3D visualization are defined
and simulated.
SimMechanics is used to optimize system-level performance and to create plant models for control design. The
models you create support your entire development process, including hardware-in-the-loop simulations.
1
"