عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






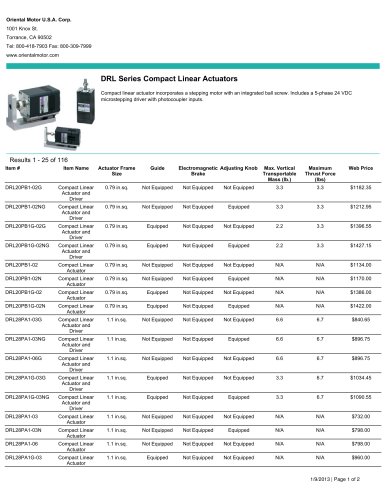
Stored Data Controller, SG8030J0 pages

SCX10
Stored Data Controller
SG8030J
●Additional Information●
Technical reference ➜ Page G-1
EMP400
SG8030J
The SG8030J incorporates a jerk limiting control
function that minimizes vibrations during motor
operation. All operations including data setting can
easily be performed using the four touchpads on the
front panel. In addition, the number of signal lines is
reduced to a minimum for easy connection.
DIN Rail Mounting Model
Recessed Mounting Model
■ Features
● Jerk Limiting Control Function Suppresses Motor Drive
Vibrations
The jerk limiting control function lets you suppress vibration that
otherwise occurs when the motor is being driven or stopped.
For example, this function is particularly useful when a belt pulley is
used to drive the motor and you want the load to be moved with low
vibration.
●Measurement Conditions
Mechanism: Belt drive
Operation mode: Positioning operation
Load: 10 kg (22 lb.)
Vibration that occurs when the operation
mode is switched from
acceleration/deceleration to constant speed
manifests as vibration of the mechanism.
Motor Shaft Speed
Motor Shaft Speed
By suppressing vibration that otherwise
occurs when the operation mode is
switched from acceleration/deceleration to
constant speed, vibration of the mechanism
is suppressed.
● Maximum Oscillation Frequency 200 kHz
The maximum oscillation frequency of 200 kHz allows motor control
in micro steps.
● 1-Pulse Output/2-Pulse Output Mode Select Possible
In addition to the 2-pulse output mode, the controller can also
provide 1-pulse output mode, which makes it compatible with a wide
range of motor drivers.
● Front Panel Single Interface for All Settings and
Operation Checks
All operations including setting of various data can be performed
using the four touchpads on the front panel. You can also check the
status of each operation simply by checking the display on the front
panel.
Touchpads
Time
Time
Linear Acceleration/Deceleration Pattern
Jerk Acceleration/Deceleration Pattern
●These graphes are provided only as a reference. The actual effect of this function will vary depending on
the mechanism of your equipment.
To achieve the same positioning time with jerk controlled acceleration/deceleration, set the
acceleration/deceleration rate to 1/2 that of linear controlled acceleration/deceleration.
● Sequential Positioning Operation/External Signal
Operation Possible
In sequential positioning operation, the start signal always causes
execution from step No. 1 in a preselected sequence.
In external signal operation, when the CW scan (or CCW scan)
signal input goes ON, operation starts. When the signal goes OFF,
slowdown stop occurs. This is useful for moving the load manually to
a desired position.
Step No.1
Step
No.2
● 48×48 mm (1.89×1.89 in.) DIN Size and Two Mounting
Configurations are Provided
The unit is very compact, measuring only W 48 mm (1.89 in.)×
D 48 mm (1.89 in.)×H 83.7 mm (3.3 in.).
Two mounting configurations are available for DIN rail mounting and
recessed mounting.
48 mm
(1.89 in.)
83.7 mm
(3.3 in.)
Step No.3
DIN Rail Mounting Model
Recessed Mounting Model
Step No.4
Speed
Sequential Positioning
Time
CW (CCW) Scan OFF
CW (CCW)
Scan
CW (CCW) Scan ON
ON
OFF
Operation of External Signals
A-388
ORIENTAL MOTOR GENERAL CATALOG
2012/2013
Page
Features A-388 / System Configuration A-389 / Specifications A-389 / Product Line A-389
Dimensions A-390 / Connection Diagrams A-391